|
| Vector3 | _transformVector (Vector3 v) const |
| |
| template<class OtherDerived> |
| internal::traits< Derived >::Scalar | angularDistance (const QuaternionBase< OtherDerived > &other) const |
| |
| template<typename NewScalarType> |
| internal::cast_return_type< Derived, Quaternion< NewScalarType > >::type | cast () const |
| |
| internal::traits< Derived >::Coefficients & | coeffs () |
| |
| const internal::traits< Derived >::Coefficients & | coeffs () const |
| |
| Quaternion< Scalar > | conjugate () const |
| |
| template<class OtherDerived> |
| Scalar | dot (const QuaternionBase< OtherDerived > &other) const |
| |
| Quaternion< Scalar > | inverse () const |
| |
| template<class OtherDerived> |
| bool | isApprox (const QuaternionBase< OtherDerived > &other, RealScalar prec=NumTraits< Scalar >::dummy_precision()) const |
| |
| RotationMatrixType | matrix () const |
| |
| RotationMatrixType | matrix () const |
| |
| Scalar | norm () const |
| |
| void | normalize () |
| |
| Quaternion< Scalar > | normalized () const |
| |
| internal::rotation_base_generic_product_selector< Derived, OtherDerived, OtherDerived::IsVectorAtCompileTime >::ReturnType | operator* (const EigenBase< OtherDerived > &e) const |
| |
| template<class OtherDerived> |
| Quaternion< typename internal::traits< Derived >::Scalar > | operator* (const QuaternionBase< OtherDerived > &other) const |
| |
| Transform< Scalar, Dim, Mode > | operator* (const Transform< Scalar, Dim, Mode, Options > &t) const |
| |
| Transform< Scalar, Dim, Isometry > | operator* (const Translation< Scalar, Dim > &t) const |
| |
| RotationMatrixType | operator* (const UniformScaling< Scalar > &s) const |
| |
| template<class OtherDerived> |
| Derived & | operator*= (const QuaternionBase< OtherDerived > &q) |
| |
| Derived & | operator= (const AngleAxisType &aa) |
| |
| template<class MatrixDerived> |
| Derived & | operator= (const MatrixBase< MatrixDerived > &xpr) |
| |
| template<typename Derived1, typename Derived2> |
| Derived & | setFromTwoVectors (const MatrixBase< Derived1 > &a, const MatrixBase< Derived2 > &b) |
| |
| QuaternionBase & | setIdentity () |
| |
| template<class OtherDerived> |
| Quaternion< Scalar > | slerp (Scalar t, const QuaternionBase< OtherDerived > &other) const |
| |
| template<class OtherDerived> |
| Quaternion< typename internal::traits< Derived >::Scalar > | slerp (Scalar t, const QuaternionBase< OtherDerived > &other) const |
| |
| Scalar | squaredNorm () const |
| |
| Matrix3 | toRotationMatrix () const |
| |
| VectorBlock< Coefficients, 3 > | vec () |
| |
| const VectorBlock< const Coefficients, 3 > | vec () const |
| |
| Scalar & | w () |
| |
| Scalar | w () const |
| |
| Scalar & | x () |
| |
| Scalar | x () const |
| |
| Scalar & | y () |
| |
| Scalar | y () const |
| |
| Scalar & | z () |
| |
| Scalar | z () const |
| |
template<class Derived>
class Eigen::QuaternionBase< Derived >
Base class for quaternion expressions.
This is defined in the Geometry module.
#include <Eigen/Geometry>
- Template Parameters
-
| Derived | derived type (CRTP) |
- See also
- class Quaternion
template<class Derived>
template<typename Derived1, typename Derived2>
- Returns
- the quaternion which transform a into b through a rotation
Sets *this to be a quaternion representing a rotation between the two arbitrary vectors a and b. In other words, the built rotation represent a rotation sending the line of direction a to the line of direction b, both lines passing through the origin.
- Returns
- a reference to
*this.
Note that the two input vectors do not have to be normalized, and do not need to have the same norm.
References MatrixBase< Matrix< _Scalar, _Rows, _Cols, _Options, _MaxRows, _MaxCols > >::col(), Eigen::ComputeFullV, MatrixBase< Matrix< _Scalar, _Rows, _Cols, _Options, _MaxRows, _MaxCols > >::cross(), MatrixBase< Matrix< _Scalar, _Rows, _Cols, _Options, _MaxRows, _MaxCols > >::dot(), JacobiSVD< _MatrixType, QRPreconditioner >::matrixV(), MatrixBase< Derived >::normalized(), MatrixBase< Matrix< _Scalar, _Rows, _Cols, _Options, _MaxRows, _MaxCols > >::transpose(), vec(), and w().
Referenced by Quaternion< Scalar >::FromTwoVectors().

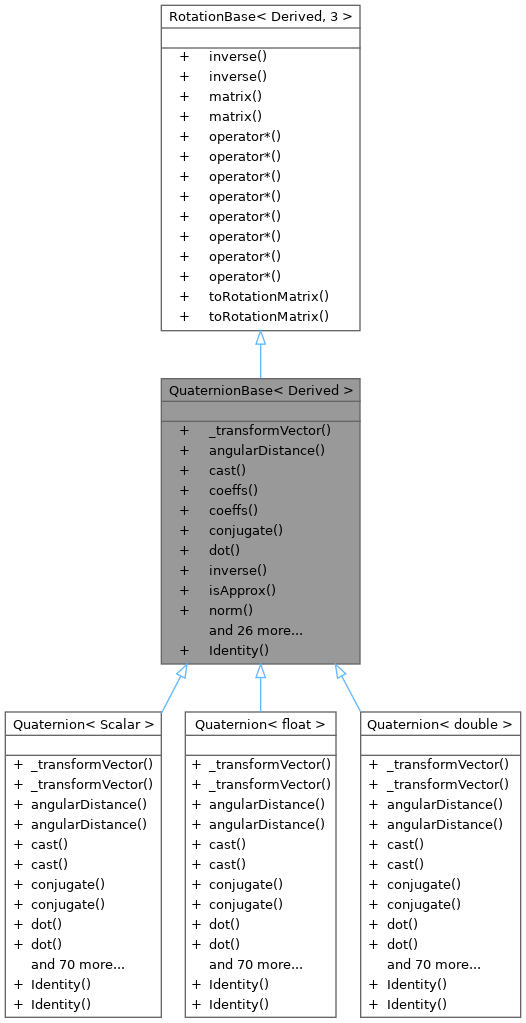
 Inheritance diagram for QuaternionBase< Derived >:
Inheritance diagram for QuaternionBase< Derived >: